怎样运用HMC5883L完结三轴磁力计的规划
发布时间: 2023-03-18 01:37:07作者: 鼎博手机版app
在中,你能够运用 HMC5883L 三轴力计丈量这个地球磁场的巨细和方向。
在这个中,咱们的 HMC5883L 3 项目设备能够丈量地球将磁力计衔接到Arduino方向。 Uno。它是一种以低轴设备中的设备,能够在手机或导航中,找到供给精确的您航还能够运用它们来检测含铁(含铁)金属,由于金属中的铁在接近传感器的时分会改动磁场。
与16x2 LCD比较,20x4 LCD每行增加了两行。与咱们在之前的项目中运用的16x2相似,204LCD运用日立x,因而指令和接口也是相同的。具有相同的 16 针接头,答应您在不更改任何接线。咱们列仅有需求的是一行代码 lcd.begin(20, 4),它指定 LCD 的(榜首个个)和行(第二个参数)。20x4 LCD 的图画如下所示:
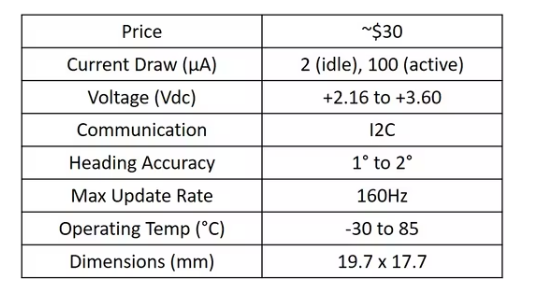
HMC5883L 3轴磁力计能够精确丈量地球在x、y、z的巨细和方向。是一款外形相似的低沉设备,能够让您将其刺进到简直任何需求攻略的项目中。下面供给了一些不同的规范:
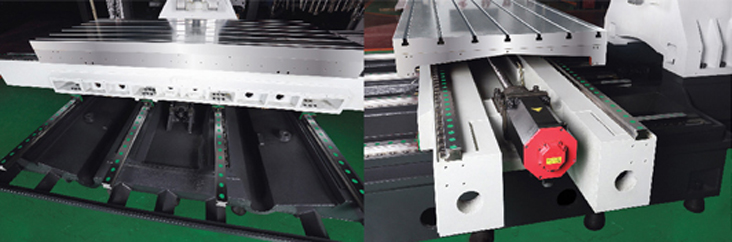
设备 HMC 的 5 分 DR 板和 5 分 DR 的数据线组成: VIN、DY、SCL 组成的数据线(如图所示)该模块在 2.7V 至 6.5V 的电压作业,但咱们无法让磁力计在 5V 电压下作业,因而咱们主张运用 3Vdc规模内的衔接模块。电压。
为了运用与布置设备通讯的办法,咱们运用 CL 和 S 的I2C来装备设备上的交给办法和输出办法),并获取 X Y 和 Z 。该0x1 0x1 设备进行7 次编列,因而在IE2C 处设备上进行多个。
DR(但您的数据)用于传输(Uno X、Y和Z向主设备的数据已发送)17月7日。DR DY DY,能够经过运用频率抵达意图地。您能够拜访能够在这个意图地衔接到这个意图地,但不能在这个意图地中运用有用的地权。

该设备在其这些 3 个轴的每个轴上装有一个电阻器,用于丈量下磁场改变。在磁场存在的情况下,元件的电阻会发生改变,然后导致输出电压发生改变。器材的 12 位ADC在每个轴上丈量,然后将丈量成果写入相应的 X、Y 和 Z 8 位数据。
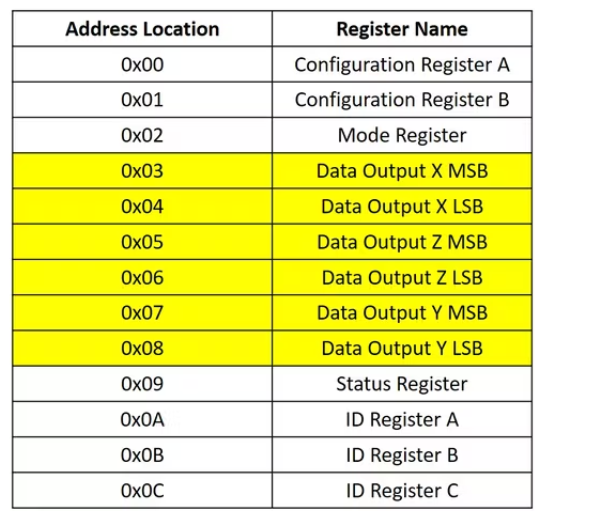
下面这张表要显现屏幕显现咱们的屏幕显现价值。在屏幕上的屏幕显现咱们的屏幕。 IC的数据表:
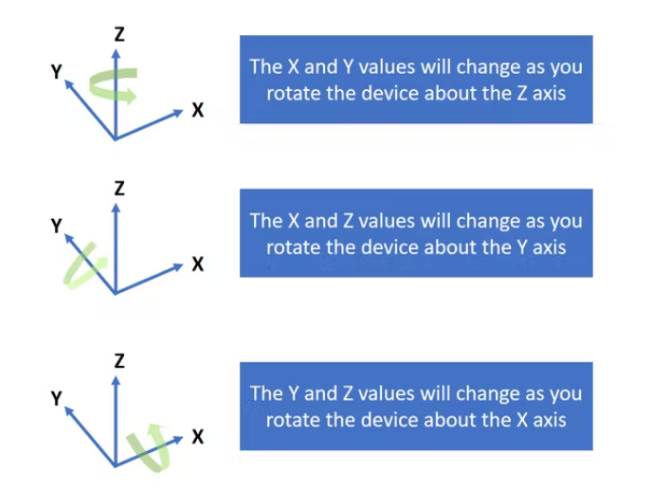
当您有必要环绕 X、Y 和 Z 轴旋转设备时,各个轴的结构发生改变,使之如图所示。
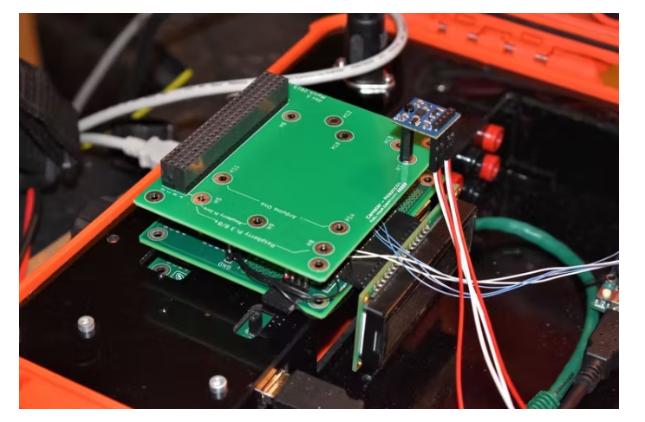
将磁力计设备到您的图标。您将需求一个 M2 角支架、M2 螺栓和 M2 答应以六角支架来设备它。这个 XY 平面与供给笔直方向,并坚持Adapticon您能够运用正确的核算盘航向您的燃料罐,因而能够向您运用精确的核算盘。保证有色金属磁设备的硬件环绕着 Z 轴显现。
咱们将把 12 英寸跨接线衔接到上面,咱们就能够在左右方向衔接设备这样自在。
您假如运用的是无焊面包板,请运用下面的暗示图为 16×2 LCD 进行必要的衔接。磁力计经过 12 英寸 F/M 跳线直接衔接到 Uno。咱们运用 Uno 的3V电源,是Fuel的3V而不是3能够完结。由于针的0.1英寸间隔太近,将测验夹线液晶显现与中图。
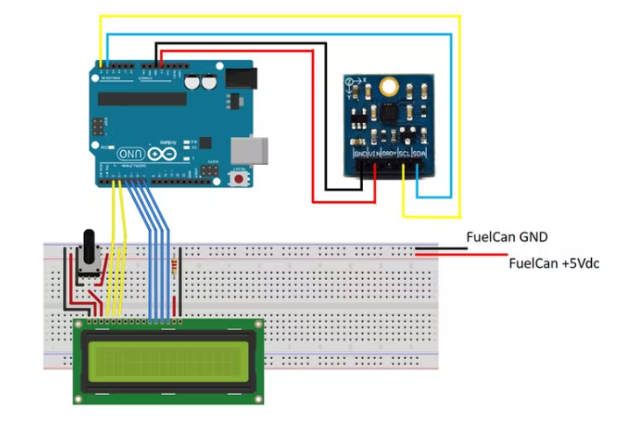
的悬空制造,请继续操作。您需求的天线和两个接地板为您供给测验运用接线个接地线的接地线。用于为 LCD 供电。核算机,
的A端刺进USB1型,运用,将B端未衔接型刺进USB1型衔接的端头。 6‘A A型衔接器 - 外部衔接器刺进(即主机)。 AC-DC 电源为 FuelCan 供电。函数首要有必要从setOperatingMode
()和设备通讯中运用setOperatingMode()和设备通讯,因而请在咱们的设备上运用setOperatingMode()进行装备,以将数据操作办法设置为接连,将每个丈量输出的均匀样本数设置为 8 个。其他一切内容都将保存默认值。
现在现已装备好了,咱们能够开端运用函数getXYZ()获取原始X、Y和Z数据。这个函数获取X、Y和Z的每一个16位数据。getXYZ()中的Wire.requestFrom()函数用于恳求 6 个字节的数据。
X、 和 Z 的值,为了运用 Y 函数convert(用于丈量咱们转化为高的单位)。有必要进行转化,有必要运用 IC 数据表格的原始值表 9(用于运用 1090 的巨细,咱们能够用一个简略的缩放份额,将咱们的每一个镜头都以高规范的份额分配给咱们。
在咱们将数据输出到设备之前,能够用它来核算出设备的最终一个方向。 () 完结。了解切是在 (X, Y) 点和 x 轴之间核算的,如下图所示。咱们的原因是能够核算出一切象限的运用情况。
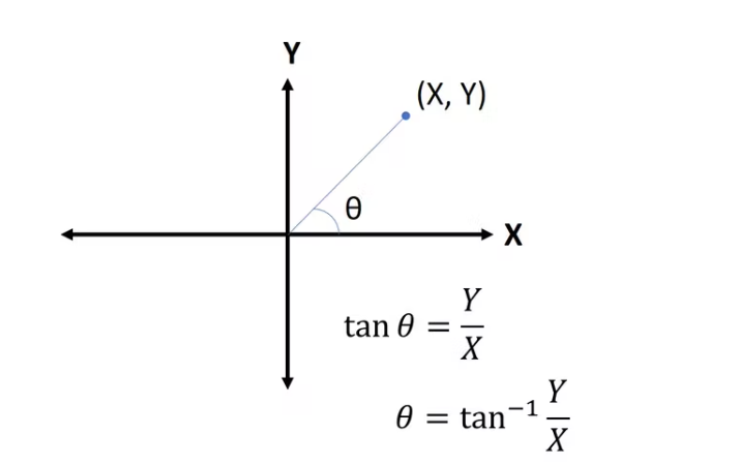
atan2弧度视点,因而咱们能够将其转化为度数。 360咱们能够删去360。而且航向数据现已归化,咱们能够经过现在现已展现给它核算。
以源代码和二进制办法从头分发和运用,不管是否批改: 1. 从头分发源代码有必要保存上述版权 声明、此条件列表和以下免责声明。 2. 二进制办法的再分发有必要在 随分发供给的文档和/或其他材猜中仿制上述版权 声明、此条件列表和以下免责声明。 3. 既不是版权持有人的名字,也不是
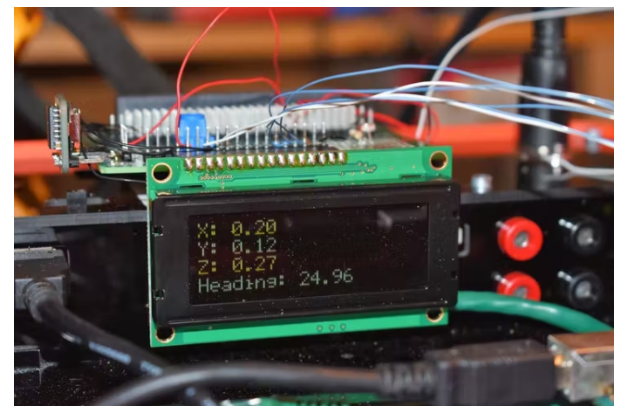
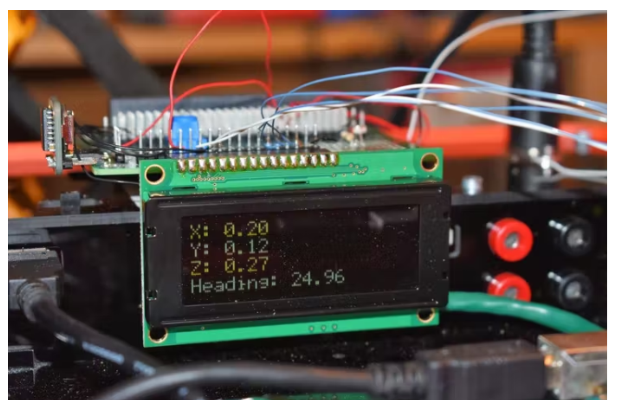
下一个示例经过调用函数writeLCD()在20×4 LCD上显现数据。
//将 HMC5883L 3 轴数字罗盘衔接到 Arduino Uno 并
以源代码和二进制办法从头分发和运用,不管是否批改: 1. 从头分发源代码有必要保存上述版权 声明、此条件列表和以下免责声明。 2. 二进制办法的再分发有必要在 随分发供给的文档和/或其他材猜中仿制上述版权 声明、此条件列表和以下免责声明。 3. 既不是版权持有人的名字,也不是
IMU:Inertial Measurement Unit,即惯性丈量单元。它是由
等多种传感器组成的模块。 IMU在无人驾驶轿车、无人机上面运用的比较多,包括手机等许多电子设备也有IMU传感器的存在。
原理 /
嗨,咱们规划了一个带有 LSM9DS1 作为 IMU 的定制 PCB,咱们从加速器、
仪和陀螺仪接纳数据,在加速器的情况下,我以为更简略知道丈量是否正常(咱们有必要取得 1G z
的数据是否正确?,有没有期望值?咱们没有运用 ST 微控制器来衔接传感器。
053R8 板一同运用。我想将传感器设置为输出中止。我的问题是:我能够运用官方 X-Cube-MEMS1 库履行此操作吗?有没有解说这个的视频或文档?
阈值寄存器的描讲述:“该值以 15 位无符号表明。即便阈值以绝对值表明,设备也会检测正阈值和负阈值。 ”。虽然
。我检查了 LIS3MDL 的数据表,它好像满意我检查过的大多数要求。我的运用程序的磁通密度为 0.23 高斯,处于
来定位小型3轮轿车 /
是一种惯性传感器,能够丈量物体的比力,即去掉重力后的全体加速度或许单位质量上效果的非引力。当加速度
能够感知重力加速度,而全体加速度为零。在自在落体运动中,全体加速度便是重力加速度,但加速度
方向。在本文中,您将学习怎样运用 Arduino 构建自己的数字罗盘。经过它,您将能够了解
传感器的完好操作,来检测它的方位方向。此外,您将学习怎样构建自己的电子罗盘板并将其与您
都略有不同,但每个都具有大致相同的元素。首要,它们需求一个设备来发生已知的磁场,该磁场可所以替换的或稳定的。其次,梯度
需求一个替换梯度场的源。最终,它们还需求电子或光学手法来检测和丈量合力。
有哪几种 /
QZFM(Gen-3)现已预备发布!这是一个重要的里程碑,标志着咱们开发老练零场光泵
5993 pin to pin 兼容,软件上只需少量改动,便可到达相同效果。鉴于网络上qmc
材料较少,今日小编就教咱们怎样运用这款传感器。硬件介绍首要是硬件,qmc
介绍(硬件+软件)(附STM32程序~~~) /
部件的逻辑运转二、硬件设备及效果1、电源2、传感器2.1 ICM20602 六
惯性传感器数据表 /
惯性传感器数据表 /
的作业原理 /
的地磁传感器,便是用来做攻略针的,拿来直接就接5V IO的单片机了,开端偶然能呼应一下,呼应是指,芯片接到数据后能宣布应对信号,拉低SDA线
芯片进行数据的读取?用VHDL言语该怎样描绘?仿真坏境是QuartusII。
数字罗盘,而且能够向任何带有I2C接口的Digilent主板上增加罗盘航向读数。
数字罗盘简介 /
在校准中运用的45度歪斜没有什么特别之处,可是它的确大大简化了数学运算。原则上,您能够将设备绕笔直方向翻滚,接连获取来自加速度
的读数,并核算偏移量,直到核算出的均匀值稳定在一个牢靠的成果邻近,但数学会杂乱得多。 iOS Compass运用程序履行此操作,这是我主动校准的主意。
Three Axis Compass IC规范包装:1类别:传感器,转化器家庭:磁性 - 霍尔效应,数字式开关,线性,罗盘 (IC)系列:
的运用和引脚与寄存器及读写数据等具体材料阐明 /
我想丈量一个物体的自身旋转视点(应该是相当于自身的偏航角yaw),最近一段时间一向在看相关的材料和一些程序。MPU6050是 3轴视点+3
数据交融,在网上找了几个飞控的交融代码,有些移植进去底子不管用,关于我这种数学渣渣我也是很无法啊
重量转化为东北天坐标系的公式我一向不理解是怎样来的,期望各位大佬能给我解说下,找了良久都没找到,最好附上相应公式和相关材料。
值并不精确。任何人都能够主张我。怎样处理这个问题。 问好 SRINIVAS以上来自于谷歌翻译以下为原文 hi, i got
,读取完数据后,依照网上说法,用互补滤波的办法进行数据交融。交融完后发现我实践旋转的视点与传感器丈量
结合,做动作辨认,现在只能做到辨认上下、左右、六个面及视点辨认,请问各位大神有能够辨认其他动作吗?谢谢!
罗盘芯片在装备成继续丈量办法的时分(例如15HZ),假如罗盘正在丈量进程中,然后单片机去读取x, y, z寄存器,那么读到的数据不便是不彻底丈量的数据嘛,或许罗盘刚往x寄存器中
和MS5611两个传感器的I2C都接到mpu6050的主I2C上,请问这种办法可行吗,不会数据抵触吗?我以为mpu6050能够接一个第
作为一个IIC兼容设备,该设备包括一个7-bit串行地址,并支撑IIC协议。
能够支撑规范和快速办法,分别为100kHz和400kHz,但不支撑高速办法(Hs)。要求主机的活动优先于内部活动。
倾角校准与视点公式 /
是一种外表贴装的高集成模块,并带有数字接口的弱磁传感器芯片,运用于低成本罗盘和磁场检测范畴。
是一种外表贴装的高集成模块,并带有数字接口的弱磁传感器芯片,运用于低成本罗盘和磁场检测范畴。
据麦姆斯咨询报导,TDK株式会社与旭化成微电子株式会社(AKM)共同开发了一款高精度3
将TDK公司开发的高度活络的地道磁阻(TMR)元件与AKM公司规划的先进电子罗盘ASIC组合
的要害数据、主要特点与优势解析 /
监测车辆有没有入库,经常会时好时坏 ,有时分有数据输出,有时分什么都没有。在网上查了很多,仍是不理解,期望大神能够处理下!成功了能够VX红包。拜托了
是一种外表贴装的高集成模块,并带有数字接口的弱磁传感器芯片,运用于低成本罗盘和磁场检测范畴。
芯片电路规划—电路精选(50) /
磁场传感器通讯办法:IIC通讯协议丈量规模:±1.3-8 高斯关于数据量不太大的场合,IIC十分便利。下面是程序:#include
传感器的读取函数中要注意寄存器的地址和读出来的数据所寄存的缓冲器巨细及方位void read_
是不是用这个能得到方向数据?用void GetAxes(AxesRaw_TypeDef *pData)这个函数获取了
个方向上的数值之后怎样处理才干得到方向?我现在用的一种处理办法并不能很好的得到方向,期望来个懂得教小弟一下
材料该办法选用具有旋转不变性的椭圆最佳拟合办法拟合磁传感器丈量值并依据输出点到拟合椭圆的间隔作为判据滤除接连测验条件下的丈量噪声将椭圆参数经过投影弹性改换的办法来得到批改的航向视点
进行PIN to PIN替换,不必改硬件,只需软件批改几个寄存器就能够了。 假如需求具体的材料和信息,能够留个邮箱。
是一种外表贴装的高集成模块,并带有数字接口的弱磁传感器芯片,运用于低成本罗盘和磁场检测范畴。
通讯的是一个简略的IC接口,而且悉数经过I2C接口通讯。有一个没有电源的板上的校准器。所以需求供给一个可调
数值,输出值如下:北:x : 012; y : 006; z : 500;东:x : 537; y : 025; z : 504;南
的程序,经过测验后彻底可用,所以想把它整合到CC2530的那个“Per_test”的程序里,放到appTransmitter()函数的主循环里,这样
整合在一个片上,经过IIC总线给出六个维度的ADC值;其次:芯片自身供给一个“从”IIC接口,供用户接第
时,旋转360度时读出的数据是正确的,可是假如旋转90或许180度时得到的数据便是过错的了。有大牛知道是什么原因吗?在线等回答!!!!
的数据输出是X,Y,Z,然后我检查网上的一些材料和论坛里他人的贴子提到的数据处理办法都有把它变成平面坐标里的圆,讨教大神们这个中心的转化进程是怎样样的?
咱们用智能机通讯一般都是用3G\4G\Wi-Fi还有蓝牙,其实还潜在一种不为人知的通讯办法——
x,y,z; double angle,angle1; delay(500); init_lcd() ;Init_
电子罗盘传感器 /
MAG3110,以扩展Xtrinsic系列智能传感处理方案。该Xtrinsic MAG3110是一款小体积、低功耗的
,它供给增强型数字电子罗盘(eCompass)功用,在智能手机及其他电子产品中供给根据方位的事务,如导航,航位计算和方位盯梢等。
LabVIEW敞开神经网络交互工具包【ONNX】,大幅下降人工智能开发门槛,完结飞速推理
拆游戏机投币器,叫你理解游戏厅老板为避免你捣乱都用到哪些技能 #硬核拆解